
新闻动态
您的位置: 网站首页 » 新闻动态北京凌鹰专利倒挂爬架电动葫芦具体实施方案
技术领域
本实用新型涉及提升机技术领域,尤其涉及一种倒挂型环链电动提升机。
背景技术
目前,在建筑施工中外墙脚手架常采用附着式升降脚手架,该脚手架使用的多采 用正挂DHP型环链电动机进行整体提升。工作时,正挂环链电动提升机将脚手架提升到位后 停止工作,在下一次提升之前需要将设备吊运到建筑物的上一层悬挂到附墙支撑上,再进 行下一次的脚手架整体提升,而正挂环链电动提升机是通过人力或小型机械吊运到上一层 的。设备的吊运需要耗费大量的人力和物力,大大增加了生产成本也增加了施工现场的安 全隐患。正挂环链电动提升机在工作过程中尾链悬在作业空间中,容易跟脚手架架体发生 缠绕,容易发生故障和安全事故,且悬在作业空间中的尾链会有晃动,影响工作人员视线, 不利于流畅作业并且容易引发设备故障和事故。
实用新型内容
本实用新型的目的是提供一种倒挂型环链电动提升机,解决现有技术正挂环链电 动提升机尾链悬挂在空间中,易跟脚手架发生缠绕导致安全事故的问题。
为解决上述技术问题,本实用新型采用如下技术方案:
本实用新型一种倒挂型环链电动提升机,包括顶部固定装置、上吊点连接件、悬挂 万向轴、吊钩、吊链和起重链轮,所述上吊点连接件通过顶部固定装置连接在架体的吊架 上,上吊点连接件上设置有第一花键和第二花键,所述悬挂万向轴的上端活动连接有第一 连接件,悬挂万向轴的下端活动连接有第二连接件,所述起重链轮安装在电机上并通过所 述电机驱动,所述吊链的一端固定连接在所述第一连接件的顶端,吊链另一端依次绕过所 述第一花键、所述第一连接件上的第一过渡键、所述第二花键、所述起重链轮、所述第二连 接件上的第二过渡键和所述吊钩,所述吊链另一端固定连接在所述第二连接件的底端。
进一步的,所述顶部固定装置包括螺杆、螺母、固定板和弹簧,所述螺杆的底端固 定连接在所述上吊点连接件上,螺杆向上贯穿所述吊架、固定板后连接有螺母,所述弹簧套 装在所述螺杆上,且所述弹簧的两端分别抵在所述吊架和所述固定板上。
再进一步的,所述上吊点连接件具体设置为凸字形结构,所述第一花键和第二花 键通过螺栓组件安装在所述上吊点连接件上。
再进一步的,所述第一花键和第二花键对称布置,且所述第一花键和第二花键均 设计为四齿花键。
再进一步的,所述悬挂万向轴的中间设置有用于与墙体固定连接的腰形孔。
再进一步的,所述悬挂万向轴的两端通过两根旋转连接件分别与所述第一连接 件、所述第二连接件相连接,所述旋转连接件的一端连接在旋转固定件上,所述旋转固定件 通过第一固定螺栓安装在所述悬挂万向轴的主体板上,位于上方的旋转连接件连接在第二 固定螺栓上,位于下方的旋转连接件连接在第三固定螺栓上。
再进一步的,所述旋转连接件连接在所述旋转固定件的一端可以绕旋转连接件的 轴心360°自由旋转。
再进一步的,所述第一过渡键通过螺栓组件连接在所述第一连接件上,所述第二 过渡键通过螺栓组件连接在所述第二连接件上。
再进一步的,所述第一过渡键和所述第二过渡键均设计为五齿花键。
与现有技术相比,本实用新型的有益技术效果:
本实用新型提升机,包括顶部固定装置、上吊点连接件、悬挂万向轴、吊钩、吊链和 起重链轮,上吊点连接件通过顶部固定装置连接在墙体的吊架上,吊链的一端固定连接在 第一连接件的顶端,吊链另一端依次绕过第一花键、第一过渡键、第二花键、起重链轮、第二 过渡键和吊钩后固定连接在第二连接件的底端,形成自循环的闭合组装,与现有技术相比 没有尾链,消除了尾链悬在作业空间中容易缠绕、别链,易发生故障和安全事故的问题。此 外,该提升机在附着式升降脚手架提升完毕后下一次提升之前,可直接将其反向运行,将悬 挂万向轴与上一层的附墙支撑连接并固定,即可进行下一次的提升,既省工省力又安全可 靠。本实用新型构思巧妙,设计科学合理,自循环的闭合组装方式,消除了尾链产生的视觉 障碍及安全隐患,实际操作省时省工省力,安全可靠。
附图说明
下面结合附图说明对本实用新型作进一步说明。
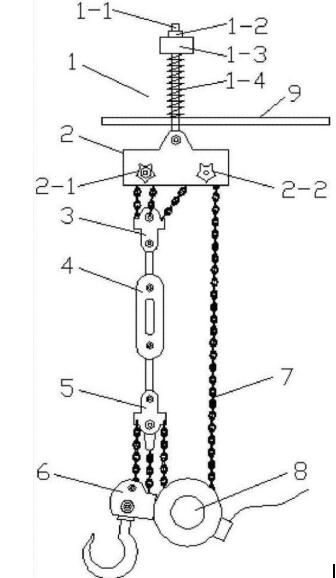
图1为本实用新型倒挂型环链电动提升机示意图;
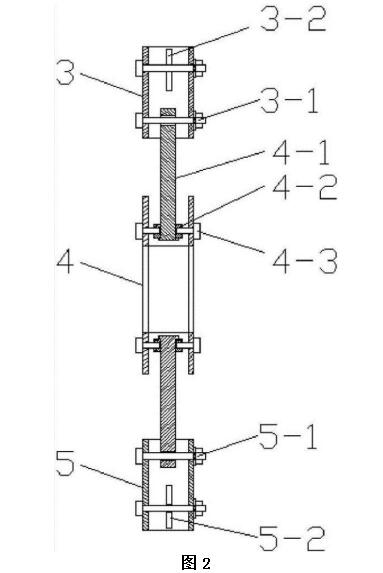
图2为本实用新型悬挂万向轴连接剖视图;
附图标记说明:1、顶部固定装置;1-1、螺杆;1-2、螺母;1-3、固定板;1-4、弹簧;2、 上吊点连接件;2-1、第一花键;2-2、第二花键;3、第一连接件;3-1、第二固定螺栓;3-2、第一 过渡键;4、悬挂万向轴;4-1、旋转连接件;4-2、旋转固定件;4-3、第一固定螺栓;5、第二连接 件;5-1、第三固定螺栓;5-2、第二过渡键;6、吊钩;7、吊链;8、起重链轮;9、吊架。
具体实施方式
如图1所示,一种倒挂型环链电动提升机,包括顶部固定装置1、上吊点连接件2、悬 挂万向轴4、吊钩6、吊链7和起重链轮8,所述上吊点连接件2通过顶部固定装置1连接在架体 的吊架9上,上吊点连接件2上设置有第一花键2-1和第二花键2-2,所述悬挂万向轴4的上端 活动连接有第一连接件3,悬挂万向轴4的下端活动连接有第二连接件5,所述起重链轮8安 装在电机上并通过所述电机驱动,所述吊链7的一端固定连接在所述第一连接件3的顶端, 吊链7另一端依次绕过所述第一花键2-1、所述第一连接件3上的第一过渡键3-2、所述第二 花键2-2、所述起重链轮8、所述第二连接件5上的第二过渡键5-2和所述吊钩6,所述吊链7另 一端固定连接在所述第二连接件5的底端上。
具体来说,所述顶部固定装置1包括螺杆1-1、螺母1-2、固定板1-3和弹簧1-4,所述 螺杆1-1的底端固定连接在所述上吊点连接件2上,螺杆1-1向上贯穿所述吊架9、固定板1-3 后连接有螺母1-2,所述弹簧1-4套装在所述螺杆1-1上,且所述弹簧1-4的两端分别抵在所 述吊架9和所述固定板1-3上。弹簧1-4的设置用于拉紧底部的整体吊装机构,防止吊链缠绕 在其中链轮上。
所述上吊点连接件2具体设置为凸字形结构,所述第一花键2-1和第二花键2-2通 过螺栓组件安装在所述上吊点连接件2上。所述第一花键2-1和第二花键2-2对称布置,且所 述第一花键2-1和第二花键2-2均设计为四齿花键。
所述悬挂万向轴4的中间设置有用于与墙体固定连接的腰形孔。工作时,一般通过 螺栓贯穿所述腰形孔后固定连接在附墙支撑上。
所述悬挂万向轴4的两端通过两根旋转连接件4-1分别与所述第一连接件3、所述 第二连接件5相连接,所述旋转连接件4-1的一端连接在旋转固定件4-2上,所述旋转固定件 4-2通过第一固定螺栓4-3安装在所述悬挂万向轴4的主体板上,位于上方的旋转连接件4-1 连接在第二固定螺栓3-1上,位于下方的旋转连接件4-1连接在第三固定螺栓5-1上。所述旋 转连接件4-1连接在所述旋转固定件4-2的一端可以绕旋转连接件4-1的轴心360°自由旋 转。
所述第一过渡键3-2通过螺栓组件连接在所述第一连接件3上,所述第二过渡键5- 2通过螺栓组件连接在所述第二连接件5上。所述第一过渡键3-2和所述第二过渡键5-2均设 计为五齿花键。
本实用新型的工作过程如下:
首先,将该电动提升机组装完整,起重链轮8安装在电机上,电机上连接电线插头, 将吊链7的一端固定连接在第一连接件3的顶端,吊链7另一端依次绕过第一花键2-1、第一 连接件3上的第一过渡键3-2、第二花键2-2、起重链轮8、第二连接件5上的第二过渡键5-2和 吊钩6,然后将吊链7的另一端固定连接在第二连接件5的底端,形成一个闭合回路实现自循 环;最后,上吊点连接件2的顶部通过螺栓与顶部固定装置1的螺杆1-1固定连接,螺杆1-1向 上依次贯穿吊架9的通孔、弹簧1-4和固定板1-3后顶部安装上螺母1-2旋紧连接固定,其中 吊架9已固定连接在架体上;同时,螺栓穿过悬挂万向轴4中间的腰形孔后将其固定连接在 附墙支撑上。本实用新型的吊链结构没有了尾链,消除了尾链悬在作业空间中容易缠绕、别 链,易发生故障和安全事故的问题。
工作时,首先将吊钩6与附着式升降脚手架架体挂接好,悬挂万向轴4通过中间腰 形孔与墙体上的附墙支撑连接,上吊点连接件2通过顶部固定装置1连接在脚手架的吊架 上,然后将电机上连接电线插头与电源连通。架体提升到位后,电机反向运行,悬挂万向轴4 与墙体上的附墙支撑脱离,将悬挂万向轴4运行到上一层的附墙支撑并与之连接,准备下一 次提升,依次循环进行,以顺利实现架体的提升作业。该操作过程中,仅需要1-2个人进行简 单的扶持定位即可完成,而现有技术的正挂环链电动提升机需要通过3-4个人或增加其他 小型机械将架体吊运到上一层,本实用新型操作更加方便,节省了操作人员,简化了操作难 度。
以上所述的实施例仅是对本实用新型的优选方式进行描述,并非对本实用新型的 范围进行限定,在不脱离本实用新型设计精神的前提下,本领域普通技术人员对本实用新 型的技术方案做出的各种变形和改进,均应落入本实用新型权利要求书确定的保护范围 内。
上一条:北京凌鹰与乾日安全科技正式达成战略合作
下一条:介绍一种整体下降贝雷架、型钢平台的群吊葫芦装置
相关新闻:
- 群吊电动葫芦现有高度检测及群吊同步系统简介
- 阐述群吊电动葫芦十点技术要求
- 群吊电动葫芦使用中如何避免超载情况的发生
- 群吊电动葫芦吊装前的检测工作有哪些?
- 群吊电动葫芦的优点及应用领域
- 浅谈避免群吊电动葫芦安全问题的方法
- 群吊电动葫芦使用前应确保这些内容
- 群吊电动葫芦的广泛应用源自经济的繁荣发展
相关产品:

北京市凌鹰起重机械厂
地址:北京市昌平区东小口
销售热线:18611422090
公司传真:010-58043523

